Engineering support for remote robotic systems and UAV payload platforms, including sensor integration, stabilization assemblies, embedded control systems, and operational interface development.
Mechanical and electronic integration of stabilized sensor packages, imaging systems, and mission-specific payload assemblies.
Gimbal control systems, motion compensation, servo control, and embedded feedback loop development.
Custom controller boards, signal conditioning, power regulation, and firmware development for remote platforms.
Authorized restoration of legacy robotics platforms, subsystem modernization, and documentation reconstruction under contract.
Robotics integration projects are treated as full system engineering engagements. Mechanical, electrical, and firmware components are developed concurrently to ensure stable operation under real-world conditions. Emphasis is placed on reliability, serviceability, and clear technical documentation.
Engagements may include early-stage prototyping, subsystem redesign, integration with existing airframes, or modernization of legacy control systems.
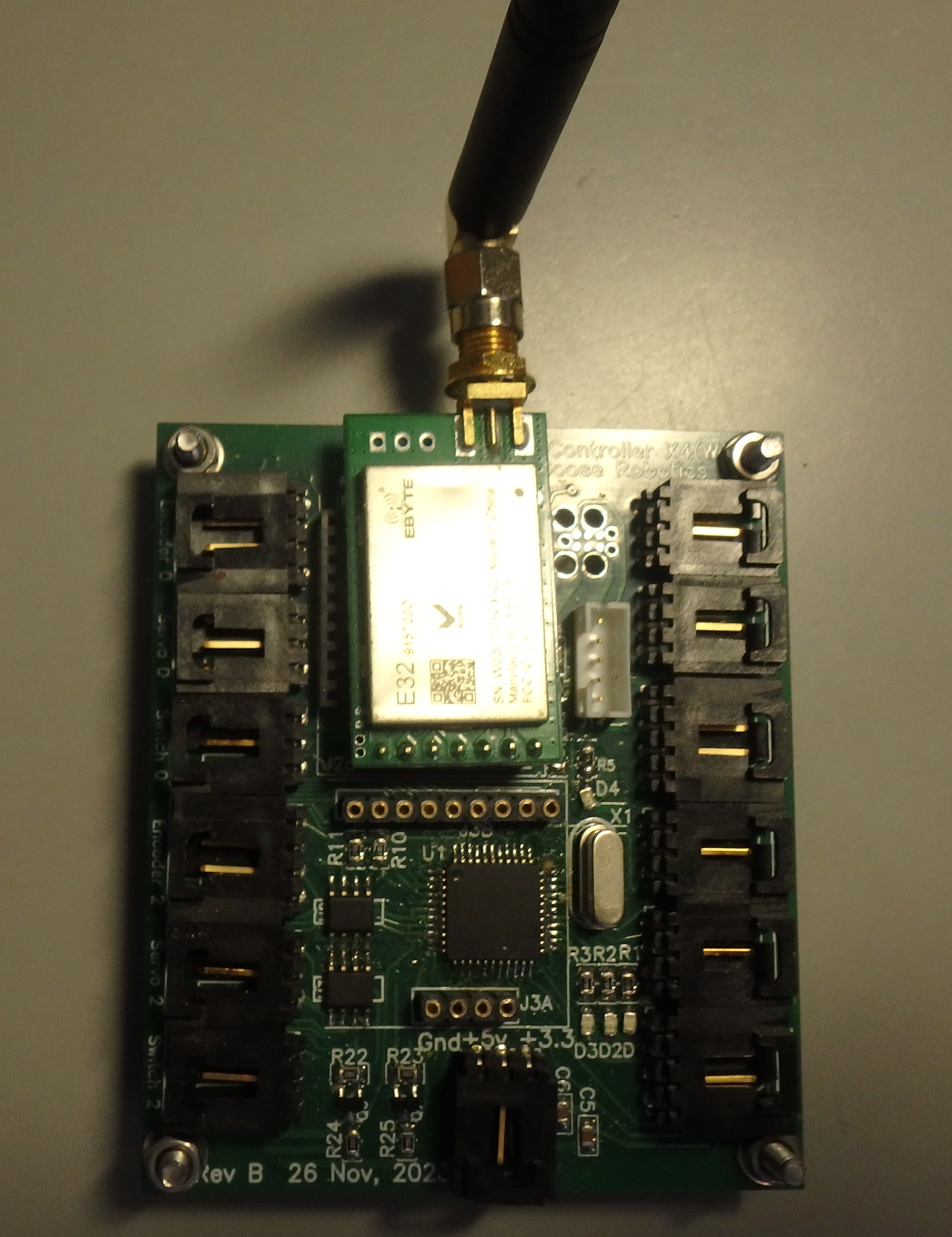
Board size is 2.75" x 3.125" - 4 channel PCM (3-axis Pitch, roll, yaw) payload controller developed for a gimbal on a remote aerial platform and for a base mounted antenna to track that platform. Uses a PIC18LF4431. Scope included custom mixed-signal control board design, servo drive development, vibration mitigation, and firmware implementation for real-time motion compensation.
Project delivered as an integrated subsystem with full schematic documentation, firmware source, and field calibration procedures under contract.
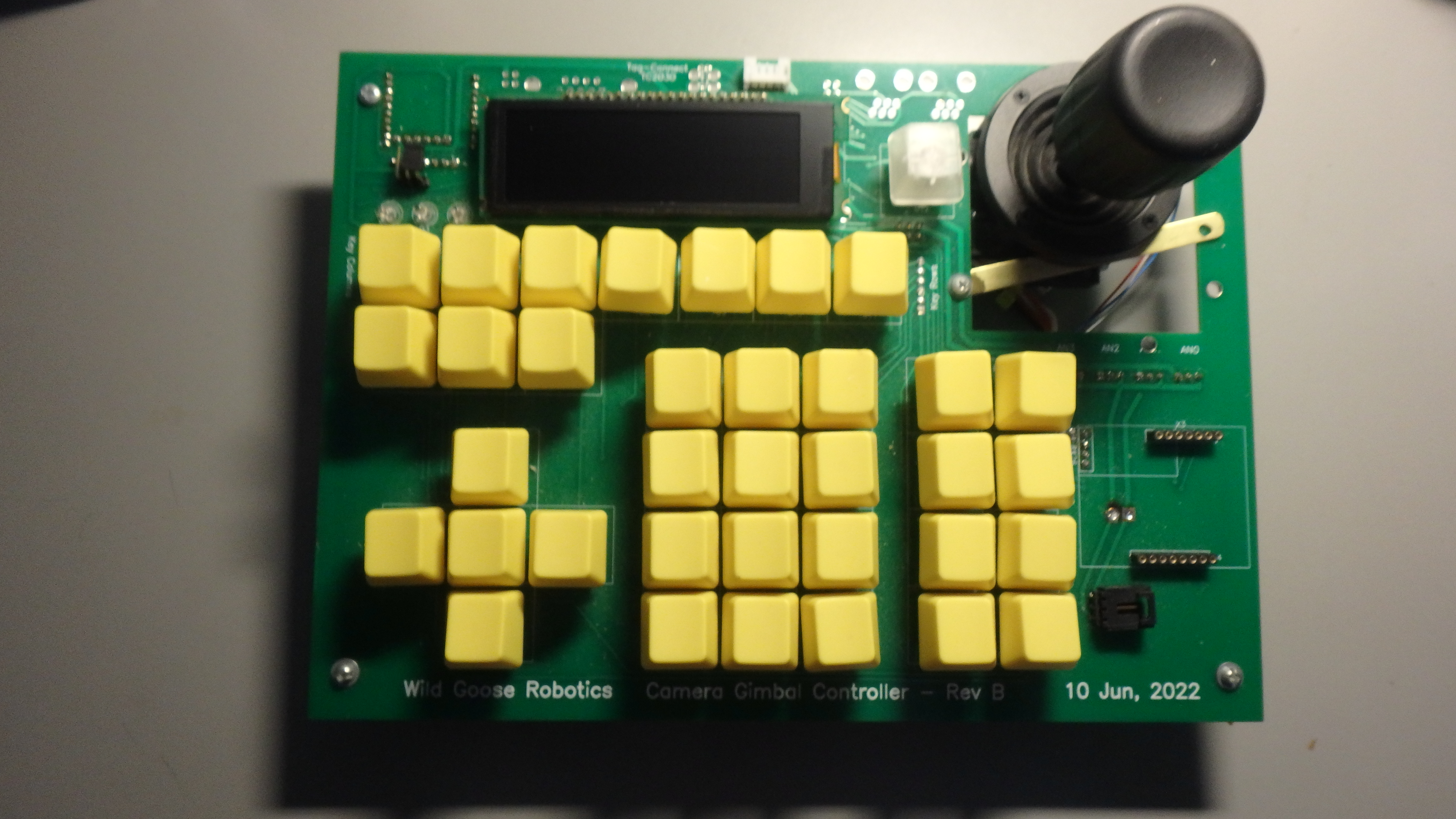
Control Unit used at base station for controlling a remote gimbal on a remote aerial platform. Uses a PIC18F56K42. RF transceiver connects to RF transceiver attached to gimbal.
Project used for testing gimbal and designed to be an eventual product.
Red/Green/White High Intensity LED's
Simple 1.25" circumference, lite weight aircraft illumination.
